“No GPS, No Problem: Exploiting Signals of Opportunity for Resilient and Accurate Autonomous Navigation in GPS-Denied Environments” presented by Zak Kassas
Posted by Sami Holt
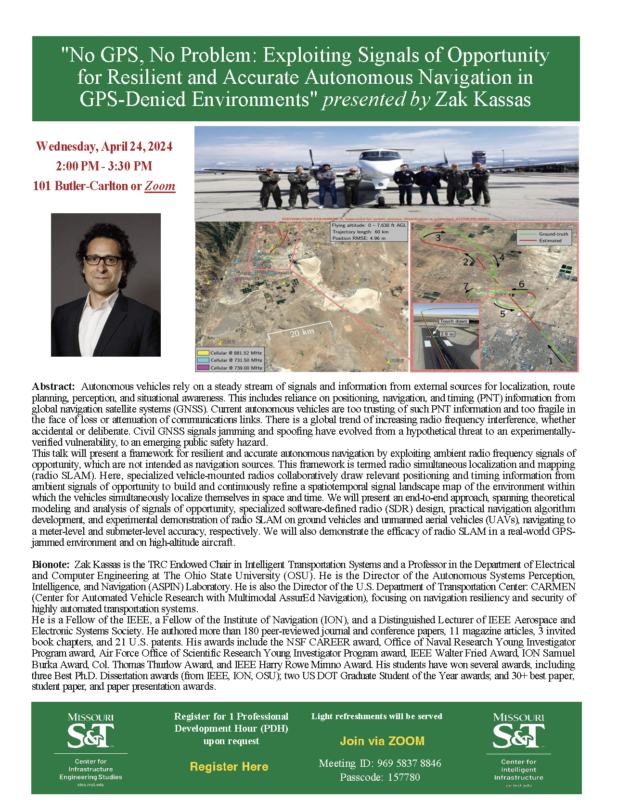
Kassas-4-24-2024-v2.png. Graphic flyer with text. Photo Credit: Dr. Zak Kassas.
Wednesday, April 24, 2024 from 2 p.m. to 3:30 p.m.
Register for 1 PDH upon request.
101 Butler Carlton or via Zoom meeting: https://umsystem.zoom.us/j/96958378846?pwd=ZnBFVlVOcXA3cTFDWk11SGFuR0hRQT
Light Refreshments will be served.
Autonomous vehicles rely on external signals for navigation and situational awareness, which can be disrupted by radio frequency interference. This talk presents a framework for accurate navigation called radio SLAM, which uses ambient signals of opportunity to build a spatiotemporal map of the environment. It includes theoretical modeling, specialized software-defined radio design, navigation algorithm development, and experimental demonstration on the ground and unmanned vehicles to achieve meter-level and submeter-level accuracy. Radio SLAM is effective in GPS-jammed environments and high-altitude aircraft.
Zak Kassas is a Professor in the Department of Electrical and Computer Engineering at The Ohio State University. He is the Director of the Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory and the Director of the U.S. Department of Transportation Center: CARMEN. Dr. Kassas has authored over 180 peer-reviewed papers and holds 21 U.S. patents. He has received several awards, including the NSF CAREER award, and his students have won numerous awards as well.
Posted by Sami Holt
